Slides¶
Overview¶
A foundation model for Earth observation (EO) data is a large-scale machine learning model pre-trained on vast amounts of remote sensing data from various satellites and sensors, designed to learn general-purpose representations of the Earth’s surface and atmospheric phenomena. These models can capture diverse features from a variety of EO datasets, such as optical, radar, thermal, and multispectral sensor imagery, and can be fine-tuned for specific tasks like environmental monitoring, land use classification, climate analysis, and disaster response.
Most current foundation models are developed using a technique called self-supervised learning, in which models learn useful representations by solving tasks that are derived from the structure of the input data itself, without relying on human-annotated labels. These tasks, known as “pretext tasks,” are designed to uncover internal patterns or latent features within the data distribution by creating a supervisory signal from the data alone. A common example is masked reconstruction, where parts of the input are intentionally hidden or removed, and the model is trained to predict or reconstruct the missing content based on the visible portions. This encourages the model to understand the underlying structure and context of the data. Other approaches to self-supervision include contrastive learning, where the model learns to distinguish between similar and dissimilar pairs of data, and generative methods, which learn to synthesize or model entire input distributions. Unlike traditional supervised learning, which relies on labeled datasets, self-supervised learning does not require labeled examples (Chen et al., 2020). Self-supervised learning can be applied in many types of modeling tasks, to include computer vision, and is gaining traction because it allows models to leverage vast amounts of unlabeled data whilst showing to be effective in improving performance across various domains.
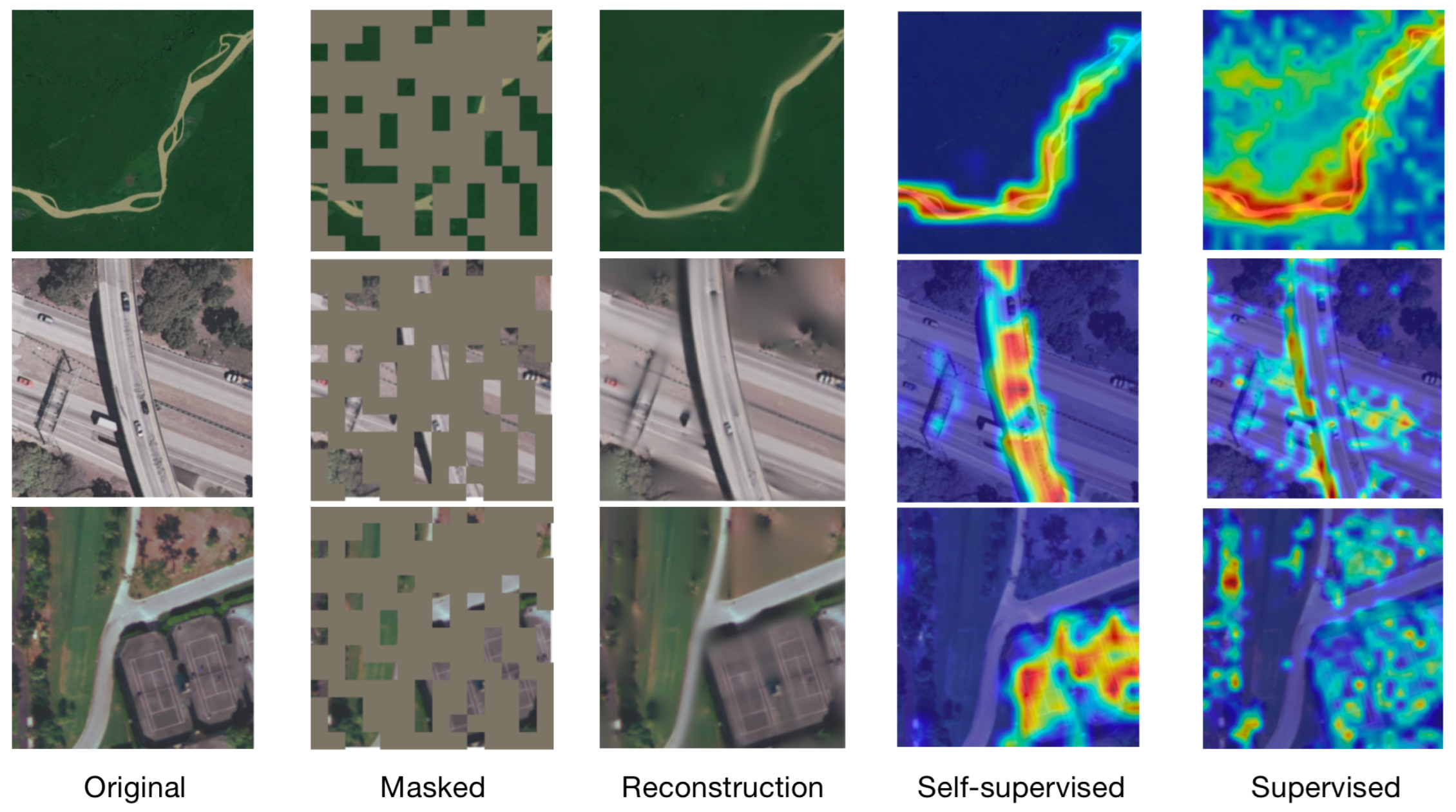
“A General Self-Supervised Framework for Remote Sensing Image Classification” by Gao et al., 2022.
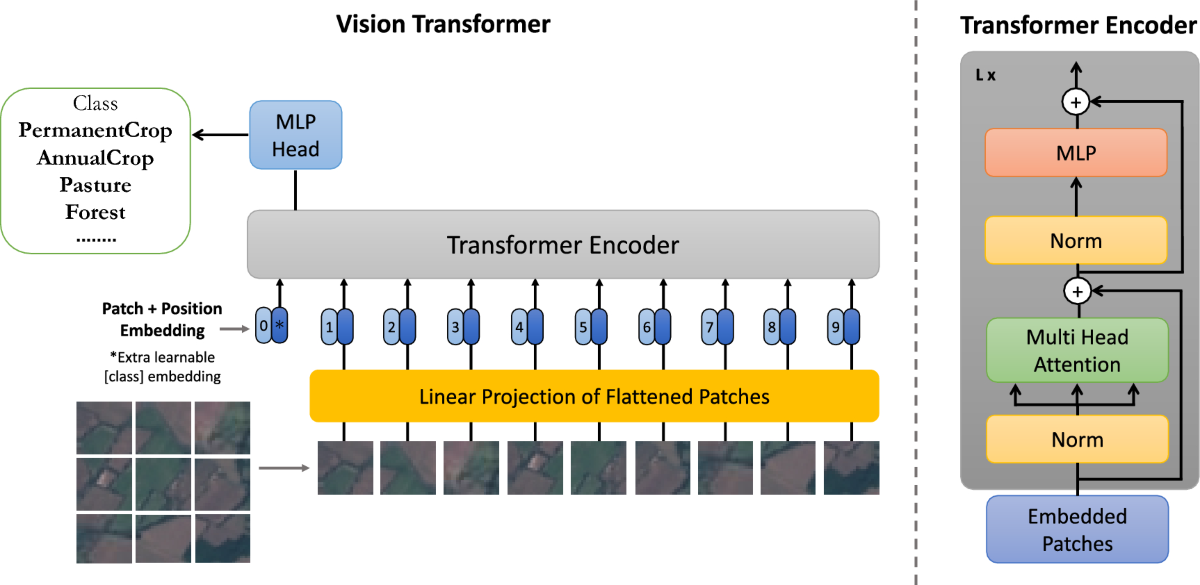
Vision Transformers (ViTs) are a class of deep learning architectures that apply the transformer framework—originally developed for natural language processing—to visual data. By dividing images into fixed-size patches and treating them as a sequence of tokens, ViTs model patterns and relationships in the data using self-attention mechanisms. While ViTs are commonly used as the architectural backbone in many vision foundation models, they are not foundation models by themselves. Rather, ViTs serve as one of the key building blocks in constructing such models. ViTs require large datasets because transformers do not have the built-in inductive biases (like translation invariance) that convolutional neural networks (CNNs) have (Dosovitskiy et al., 2021). The data provided to train these models must be crafted with thoughtful sampling and stratification to ensure the correct representations are learned, and biases or artifacts reduced. Once that is ensured, it is worth considering that the effectiveness of these models greatly improves with larger datasets by provisioning more examples and greater diversity, thereby allowing the model to learn robust representations that generalize well across different tasks. More data improves the learning signal and helps the model differentiate between subtle visual cues (Chen et al., 2020).
A foundation model’s extensive training regime enables its applicability across various downstream tasks. To achieve a properly trained FM, exposure to diverse and extensive data is needed in order to capture the variability and complexity inherent in real-world settings. For vision-specific foundation models, this means learning representations that can differentiate between millions of different phenomena, scenes, textures, lighting conditions, and other visual phenomena (Dosovitskiy et al., 2021). Large datasets help foundation models handle data bias and distribution shifts. For remote sensing vision tasks, biases can come from the sensor type, camera angle, geographic location, weather and lighting conditions under which images were captured (Radford et al., 2021). Training on diverse datasets that encompass multiple contexts and environments helps the model learn robust representations that generalize well across different conditions. Furthermore, training large models with millions (or billions) of parameters requires substantial data to avoid overfitting. When training vision-specific models, such as those using Vision Transformers (ViTs) as the underlying architecture or applying a self-supervised learning paradigm, having large datasets ensures that the model does not merely memorize the training data but learns generalized features that are useful across tasks (Dosovitskiy et al., 2021). Yet, while large datasets can support the learning of generalized features rather than memorization, increasing dataset size alone does not guarantee generalization—especially as models grow in parameter count. Since larger models also have a higher capacity to memorize training data, which can lead to overfitting, the task of properly sampling and splitting the data is crucial. Ensuring meaningful generalization requires careful dataset sampling and experimental design. Researchers must ensure that evaluation data (e.g., test sets) contain spatial and/or temporal slices not seen during training to mitigate data leakage and provide more robust evidence that performance stems from generalization, not memorization.
As stated, many vision foundation models rely on self-supervised learning, where they generate their own supervision signals from the data itself by solving pretext tasks—such as predicting masked patches in an image or distinguishing between augmented views. While large datasets offer the diversity needed to expose models to a broad range of visual patterns and contexts, dataset size alone is not sufficient. The quality, representativeness, and sampling strategy of the data are equally critical. Poorly sampled or imbalanced data can bias the model or lead to overfitting, especially in self-supervised setups where the supervision signal comes entirely from the data distribution. Careful attention must be paid to spatial and temporal coverage, stratification across relevant factors (e.g., class distributions, lighting conditions, sensor types), and avoidance of data leakage. High-quality, well-curated datasets not only enhance learning but also ensure that the representations learned are robust, transferable, and capable of capturing fine-grained details like textures, colors, and shapes across diverse conditions.
How foundation models improve efficiency in machine learning workflows¶
Foundation models improve efficiency in machine learning workflows by enabling tasks such as zero-shot inference, transfer learning, and general-purpose feature extraction with minimal task-specific data or training. These theoretical benefits have been demonstrated in practical applications across domains. For example, Prithvi (Prithvi-EO-1.0 and 2.0) has shown state-of-the-art performance in flood detection and above ground biomass estimation with limited labeled data (Jakubik et al., 2023 and Szwarcman et al., 2025). CLAY has demonstrated robust zero-shot generalization across different geographies and resolutions. For example, it enabled zero shot detection of deforestation events in Schroer et al., 2025. These efficiencies translate to significant reductions in labeling costs and compute resources, especially in data-scarce or resource-constrained settings.
1. Reduced training costs¶
Traditional models often require training from scratch for every application, demanding significant computational resources and labeled datasets, which is especially challenging in earth observation contexts. Foundation models are pre-trained on massive datasets and can be fine-tuned for specific tasks using smaller labeled datasets, drastically reducing the costs of data annotation and training. Since these models undergo extensive pre-training on diverse datasets, they allow for the advantage of transfer learning to enable high performance with limited fine-tuning using smaller, domain-specific datasets. Suffice to say, foundation models reduce barriers to entry for users with limited resources.
Example: Instead of creating a wholly new model for deforestation detection, a pre-trained foundation model can be adapted in a fraction of the time and cost.
2. Faster development¶
Foundation models accelerate the development cycle by providing ready-to-use features or embeddings. This eliminates the need for extensive preprocessing and training, allowing users to focus on fine-tuning or directly deploying the model.
Example: A user working with PCA analysis on hurricane impacts can use pre-trained embeddings from a foundation model, reducing the need to engineer complex features.
3. Improved accuracy with limited data¶
Foundation models benefit from their extensive pre-training, making them robust and effective even when fine-tuned with limited domain-specific data. This reduces the need for expensive and time-consuming field campaigns or data collection.
Example: Foundation models trained with weather data may have a baseline understanding of confounding weather variation that would otherwise have to be learned from the extensive collection and labeling of target features under different weather conditions.
4. Scalability across applications¶
A single foundation model can be repurposed for various tasks, avoiding the cost of building separate models for each application.
Example: A foundation model trained on global land cover data can be applied to soil health assessment, mangrove monitoring, or coral reef health analysis.
5. Democratizing access¶
With pre-trained foundation models available as open-source or through APIs, smaller organizations and researchers gain access to high-quality tools without investing in expensive infrastructure.
6. Good backbones (better than ImageNet or RGB-trained models)¶
Foundation models for EO are trained on specialized geospatial datasets (e.g. multi-spectral or radar satellite imagery), making their feature representations more aligned with EO tasks compared to models pre-trained on ImageNet or similar RGB datasets. EO data often includes multi-spectral bands (e.g., near-infrared) or radar data, which contain richer and more complex information than standard RGB images.
Example: A foundation model trained on multi-spectral imagery will perform better for tasks like vegetation health assessment than an RGB-trained ImageNet model.
7. Not as good as bespoke models, but get 90% there with 10% of the work¶
While foundation models may not achieve the same level of accuracy as task-specific bespoke models, they deliver competitive results with a fraction of the effort. Bespoke models demand extensive tuning, custom architectures, and domain expertise, which are costly and time-intensive. Foundation models offer a practical compromise.
Example: For deforestation detection, a bespoke model might achieve 95% accuracy, while a foundation model could achieve 90% accuracy with significantly less effort.
Limitations¶
All this said, foundation models are still a relatively new development in EO and have yet to see widespread validation across diverse real-world applications. Thus, while promising, their adoption is still in its early stages. Challenges like model bias, scalability, and performance in extreme conditions require further study.
Example: A foundation model trained on global land cover data might need more validation to ensure reliability in highly localized or unique environments.
Challenges¶
There are multiple aspects of Earth Observation Foundation Models (EOFM) that are unique to the broader scope of foundation models research. Earth observation imagery is very diverse in how it is captured. The instruments capture various frequencies at different wavelength and band widths, the ground sampling distance of the captured imagery ranges from a few centimeters to hundreds of meters, and the same location is often captured at multiple points in time. These substantial differences in the spectral, spatial, and temporal resolution make it harder for models to learn generalized patterns. In addition, earth observation data also has unique metadata characteristics that can be deterministic for the quality and the potential content of a dataset. Examples are the coordinate reference system used, the latitude and longitude location of the captured image, view angles that may be different from image to image, and data provenance artifacts such as how the data is stored and served across various providers.
Foundation models in EO would ideally capture and learn from as many of the key dimensions and metadata items as possible. An ideal model would be trained on a wide range of variation in these parameters (spatial, spectral, temporal resolutions, as well as geography, for example) during the learning process, via methods like global sampling over multiple years and seasons, as well as for a wide range of different sensors at different resolutions. Similarly, models would ideally accept a wide range of formats and image sizes during inference.
While no single model to date fully integrates all relevant dimensions of remote sensing complexity—such as temporal dynamics, multi-sensor fusion, and variable spatial and spectral resolutions—there are promising efforts in each area: for instance, Prithvi and Presto explore temporal modeling, DOFA addresses multi-sensor fusion, and Clay supports variable image resolutions and types. However, the goal need not be a single, monolithic model that captures all aspects simultaneously. In practice, combining multiple specialized models in modular or hierarchical architectures can offer a more scalable and adaptable approach. These modular systems can collaboratively represent the rich diversity of the remote sensing domain, allowing for flexible subsetting, expansion, and fine-tuning across tasks. It’s important to think creatively about architecture design, embracing hybrid strategies that align with the diverse and evolving nature of geospatial data.
- Chen, T., Kornblith, S., Norouzi, M., & Hinton, G. (2020). A Simple Framework for Contrastive Learning of Visual Representations. arXiv. 10.48550/ARXIV.2002.05709
- Gao, Y., Sun, X., & Liu, C. (2022). A General Self-Supervised Framework for Remote Sensing Image Classification. Remote Sensing, 14(19), 4824. 10.3390/rs14194824
- Dosovitskiy, A., Beyer, L., Kolesnikov, A., Weissenborn, D., Zhai, X., Unterthiner, T., Dehghani, M., Minderer, M., Heigold, G., Gelly, S., Uszkoreit, J., & Houlsby, N. (2020). An Image is Worth 16x16 Words: Transformers for Image Recognition at Scale. arXiv. 10.48550/ARXIV.2010.11929
- Khan, M., Hanan, A., Kenzhebay, M., Gazzea, M., & Arghandeh, R. (2024). Transformer-based land use and land cover classification with explainability using satellite imagery. Scientific Reports, 14(1). 10.1038/s41598-024-67186-4
- Radford, A., Kim, J. W., Hallacy, C., Ramesh, A., Goh, G., Agarwal, S., Sastry, G., Askell, A., Mishkin, P., Clark, J., Krueger, G., & Sutskever, I. (2021). Learning Transferable Visual Models From Natural Language Supervision. arXiv. 10.48550/ARXIV.2103.00020
- Jakubik, J., Roy, S., Phillips, C. E., Fraccaro, P., Godwin, D., Zadrozny, B., Szwarcman, D., Gomes, C., Nyirjesy, G., Edwards, B., Kimura, D., Simumba, N., Chu, L., Mukkavilli, S. K., Lambhate, D., Das, K., Bangalore, R., Oliveira, D., Muszynski, M., … Ramachandran, R. (2023). Foundation Models for Generalist Geospatial Artificial Intelligence. arXiv. 10.48550/ARXIV.2310.18660
- Szwarcman, D., Roy, S., Fraccaro, P., Gíslason, Þ. E., Blumenstiel, B., Ghosal, R., de Oliveira, P. H., Almeida, J. L. de S., Sedona, R., Kang, Y., Chakraborty, S., Wang, S., Gomes, C., Kumar, A., Truong, M., Godwin, D., Lee, H., Hsu, C.-Y., Asanjan, A. A., … Moreno, J. B. (2024). Prithvi-EO-2.0: A Versatile Multi-Temporal Foundation Model for Earth Observation Applications. arXiv. 10.48550/ARXIV.2412.02732
- Tseng, G., Cartuyvels, R., Zvonkov, I., Purohit, M., Rolnick, D., & Kerner, H. (2023). Lightweight, Pre-trained Transformers for Remote Sensing Timeseries. arXiv. 10.48550/ARXIV.2304.14065
- Xiong, Z., Wang, Y., Zhang, F., Stewart, A. J., Hanna, J., Borth, D., Papoutsis, I., Saux, B. L., Camps-Valls, G., & Zhu, X. X. (2024). Neural Plasticity-Inspired Multimodal Foundation Model for Earth Observation. arXiv. 10.48550/ARXIV.2403.15356